Immersive crowd research mixing real and virtual agents in realistic environment
2023 to 2025 in VirtUS Team at INRIA Rennes, France Blog post
Developing mixed reality virtual training systems to improve workers safety : Caduta dall'Alto project
2021 to 2023 in Vicarios Team at IIT Genoa, Italy Blog post
Immersive teleoperation for emergency scenarios on quadruped robot : Robot Teleoperativo 2 project
2021 to 2023 in Vicarios Team at IIT Genoa, Italy Blog post
Research on Immersive teleoperation of telepresence robots : TENSIVE project
2016 to 2019 at Gipsa‑Lab and INRIA, Grenoble, France
Immersive project reviews with native CAD data
2013 to 2015 to Venise Team LIMSI, Orsay, France
As part of the prestigious IEEEVR A* conference on XR research.
I had the privilege to chair the first edition of the IEEEVR 2025 XR Gallery fostering bridges between digital artists and researchers questioning the fundamentals of the immersive spaces we’re interacting with daily.
Despite their intellectual affinities, bringing these two worlds together required a great deal of compromise and adaptation.
We got positively surprised by the amount of great quality submissions we got for this new format (68 submission, 25 Shortlisted after a double-blind review process , 17 accepted).
A bit more than 12000+ people attented the event between march 10-12 2025 in Saint Malo France.
According to feedback from researchers and artists, the first edition of the IEEEVR25 XR gallery was a great success.
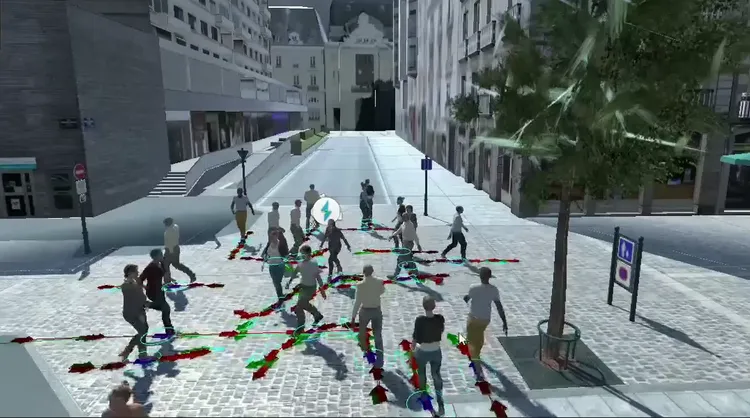
As an XR research engineer in the VirtUs research team, I was involved in the creation of immersive spaces (VR/XR) where real humans and virtual agents are coexisting with a sufficient level of realism so that the virtual experience and its results can be transposed into reality. In this role, I maintained the team's XR hardware and softwares ( CrowdMP and UMANS) while also providing supervision.

Caduta dall'Alto (Falling from Heights) is a project exploring a set of novel safety and mixed reality virtual training systems to improve workers safety when working at heights.
The main challenges lie in the precise understanding of the mechanisms leading to the fall, in reliable bio-mechanical models, and in a realistic design for a mixed reality training environment. At the same time, ergonomics must be thoroughly investigated with field professionals to ensure their specific needs and peculiar concerns are fully met.
This project was held in collaboration with INAIL (Italian National Institute for Insurance against Accidents at Work).

Robot Teleoperativo 2 is addressing immersive and collaborative teleoperation use-cases in challenging environments. Part of my work here is directed towards efficient integration of sensors data from the robotic platform as well as their meaningful representation inside a virtual environment for the pilot operator and his collaborators.
This project was held in collaboration with INAIL (Italian National Institute for Insurance against Accidents at Work).

TENSIVE : Immersive teleoperation of telepresence robots for verbal interaction and social navigation
From 2016 to 2019 between GIPSA-lab, Univ. Grenoble-Alpes, INRIA Grenoble, Grenoble, France
The TENSIVE project focuses on designing and evaluating a new generation of immersive telepresence robot control systems, aimed at enhancing navigation and verbal interaction capabilities for humanoid robots.
A key challenge of the project is to foster a sense of virtual "embodiment" within the robotic platform by providing a coherent visual representation of the remote environment—particularly through the robot's head and eye movements.
The system also supports semi-automatic immersive navigation driven by the pilot’s body and gaze.
As part of my PhD work, I took part in the development of a new paradigm for immersive teleoperation called SGCS (Stereo Gaze Contingent Steering), which allows control of the iCub robot’s head and gaze using the pilot’s head orientation and eye vergence.
The VR setup utilized Oculus DK2 and HTC Vive headsets, both equipped with SMI eye-tracking technology, and the robot was controlled through the YARP framework.
In the later stages of the project, I used a Pepper robot to implement immersive teleoperated navigation using the ROS framework.
Characterizing postural control through visual stimulis
From February-June 2016 at ISIR, Paris, FranceIn this research internship, I characterized the rôle of vision in postural control. Based on the work done on the "Moving Box paradigm" (Lee1978), I was questionning how vision can influence balance and drive it. Our setup platform consisted of a VR head-mounted-display and a force platform (wii balance board).
Visio-haptic interaction with immersive CAD data
From May-September 2014 and February-September 2015 in Venise Team at LIMSI, Orsay, FranceAs part of those two research internships, I have explored the use of haptic devices in immersive project reviews in order to offer news paradigms for an accurate modification CAD objects.
Doctoral program in immerssive telepresence
2016 to 2019 at Gipsa‑Lab (CNRS ‑ Grenoble INP) and INRIA, Grenoble, France
Master’s Degree in robotic : M2 SDI-SAR ( Systèmes Avancés et Robotique)
2015 to 2016 at UPMC (Université Pierre-et-Marie-Curie), Arts et Métiers ParisTech, Paris, France
Research Master’s Degree in Human Computer Interaction : M2R interaction
2014 to 2015 at UPSud (Université Paris Sud -- Paris XI), Orsay, France
Engineer Degree in virtual reality , digital processing, and computer sciences
2012 to 2015 at EFREI (École française d'électronique et d'informatique), Villejuif, France
Bachelor in computer science : Mention Mathematiques Et Informatique
2012 to 2013 at Université Paris-Est, Marne-la-Vallée, France
International Bachelor in engineering
2011 to 2012 at Jönköping Tekniska Högskolan (Engineering School of Jönköping) , Jönköping, Sweden
Higher National Diploma (DUT): Applied Physics and measurements Degree in instrumentation
2009 to 2011 at IUT Mesures Physiques, Université Jean Monnet , Saint-Etienne, France